Die Steuerung bewegter Objekte ist ein aktuelles Thema und deckt die Gebiete Autonomes Fahren, Roboterbetrieb, Drohnenflug sowie andere fachspezifische Bereiche wie z.B. den automatisierten Betrieb von Baumaschinen ab. Die automatische Steuerung von bewegten Objekten eröffnet viele neue Einsatzmöglichkeiten und trägt außerdem zur Qualitätssteigerung bei der Ausführung gestellter Aufgaben bei. Auch die Kosten können dadurch gesenkt und die Sicherheit für Menschen erhöht werden.
Der Einsatz geeigneter Messsysteme, wie z.B. GNSS (Global Navigation Satellite Systems), Tachymeter oder Inertiale Messeinheiten (IMU) sind in diesem Zusammenhang unerlässlich. Dabei wird unterschieden, ob ein bewegtes Objekt nur verfolgt und dessen Position bestimmt werden soll oder ob dieses Objekt, unter Verwendung der Messdaten der eingesetzten Messsysteme, auch gesteuert werden soll. Zur Steuerung bedarf es weiterer Maßnahmen wie die Bereitstellung mathematischer Modelle, das die Beschreibung der Geometrie und die Implementierung von Regelkreisen.
Beispiel 1: Baumaschinensteuerung
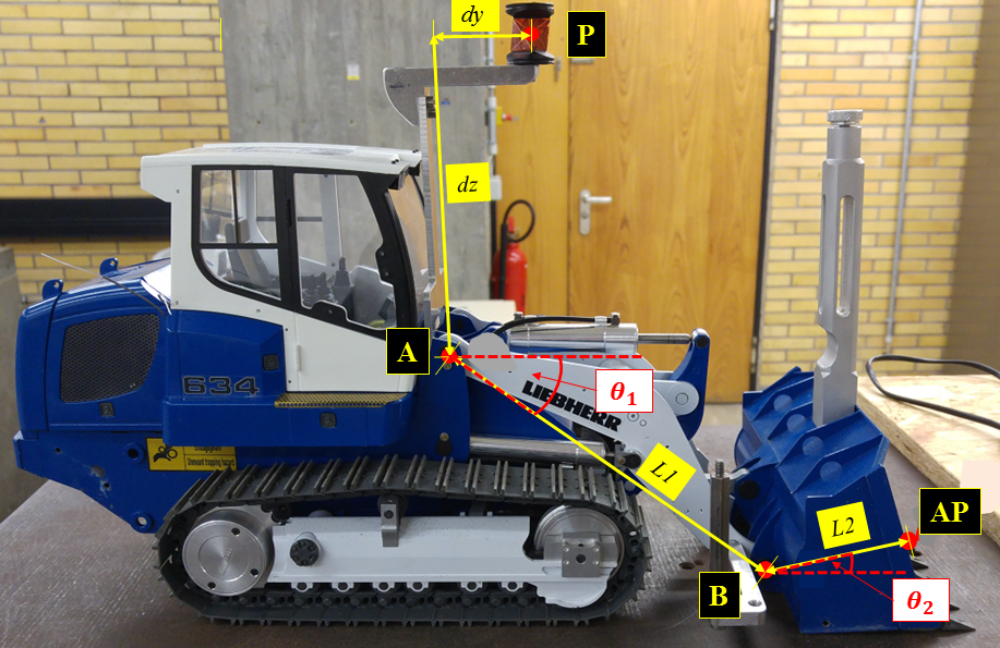
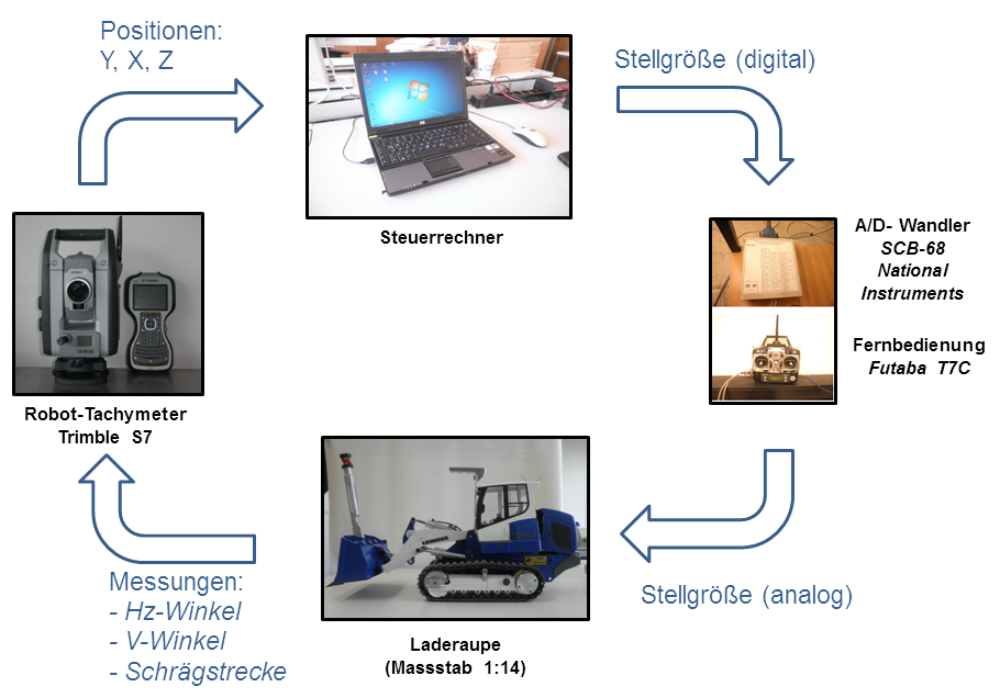
In diesem Beispiel wird die vollautomatische Durchführung von Ladevorgängen umgesetzt. Als Untersuchungsobjekt kam eine Modellladeraupe im Maßstab 1:14 zum Einsatz. Die Erkenntnisse können, mit Einschränkungen, auf reale Maschinen übertragen werden.

Im ersten Schritt wird ein geometrisches Modell der Maschine aufgestellt. Dazu wird unter der Betrachtung der Hebelarme und der sich bewegenden Teile eine Parametrisierung der Maschinenelemente vorgenommen.
Im nächsten Schritt muss die Konzipierung der Regelkreise vorgenommen werden.
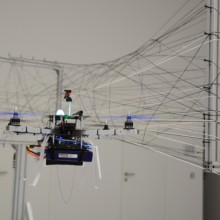
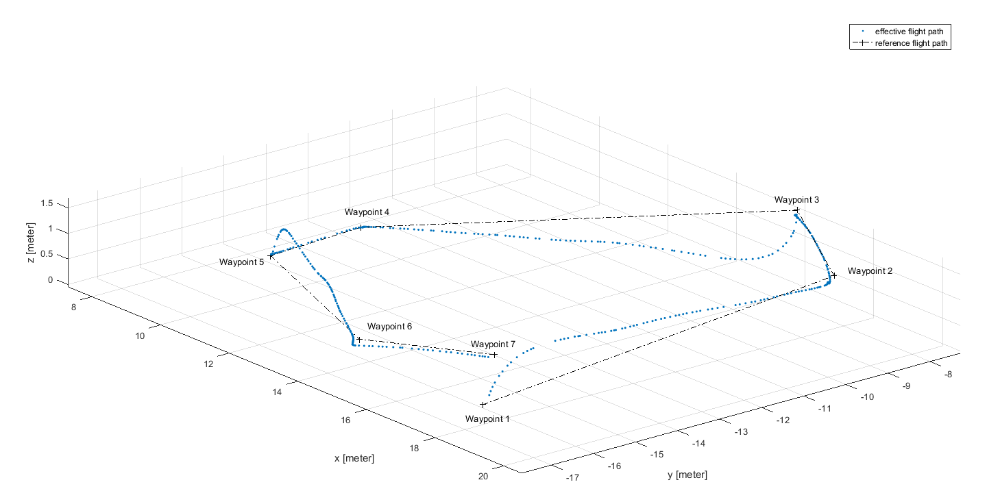
Beispiel 2: UAV Steuerung im Hochbau
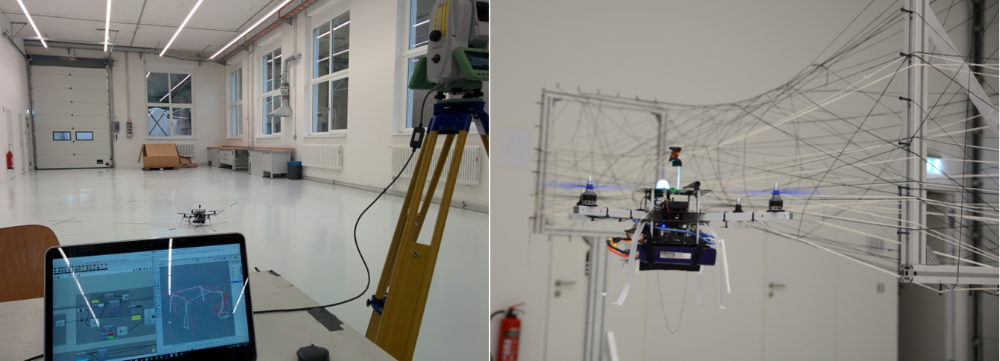
Dieses Beispiel zeigt die Umsetzung einer Drohnensteuerung mit einem Tachymeter zur Erstellung von Faserverbundkonstruktionen.
Häufig besteht die sensorische Grundausstattung einer Drohne unter anderem aus einem GNSS Empfänger, der die Position der Drohne liefert. Ein großer Nachteil beim Einsatz von GNSS ist die Genauigkeit, die im Regellfall bei wenigen Dezimetern liegt und unter Verwendung eines Korrekturdienstes Zentimeter-Genauigkeiten erreichen kann. Des Weiteren ist ein GNSS-Einsatz in Innenbereichen (Hallen, Gebäude, Tunnel, usw.) aufgrund des nicht vorhandenen Signalempfangs nicht möglich. Der Einsatz von Tachymetern schafft hier Abhilfe, sowohl was die Genauigkeit angeht als auch den Einsatz von Drohnen in Innenbereichen.
Kontakt
