
Navigationsinstrumente zu Wasser, Land und in der Luft
Das Wort Navigation kommt aus dem Lateinischen (navigare) und bezeichnet ursprünglich das Führen eines Schiffes. Heute versteht man unter Navigation die Führung aller Fahrzeuge und beweglichen Objekte. Somit ist der Begriff nicht nur auf die Schifffahrt begrenzt, sondern bezieht die Navigation zu Land und im Weltraum mit ein.
Allgemein genommen ist die Navigation die Wissenschaft zur Lösung des Problems, wie man optimal von einem Ausgangspunkt zu einem vorgegebenen Zielpunkt kommt. Hierbei müssen die folgenden drei Fragen beantwortet werden:
- Wo bin ich?
- Wohin will ich?
- Wie und mit welchen Instrumenten komme ich dort hin?
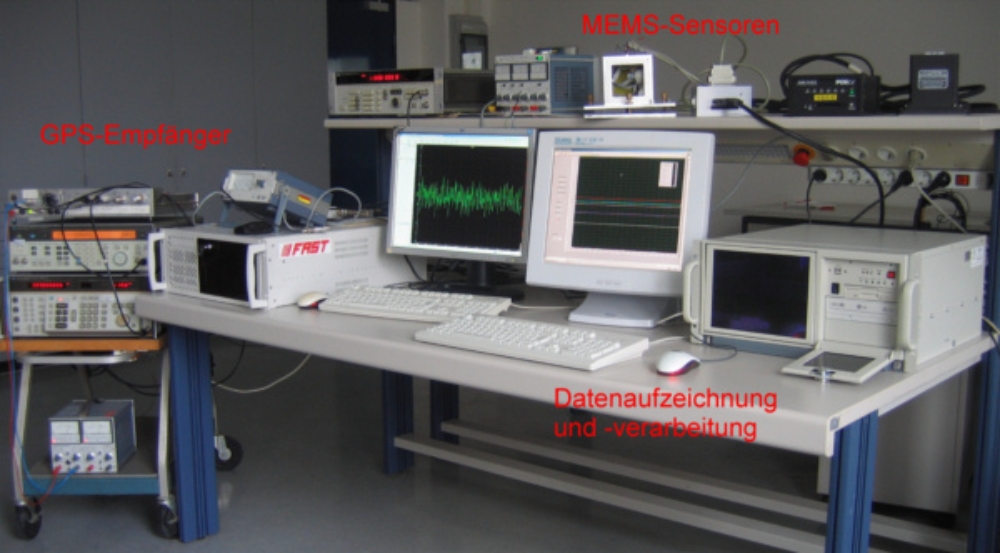
Die erste Frage beinhaltet die Bestimmung der Anfangsposition. Diese kann zum Beispiel mit Sextanten, Peilungen und entsprechendem Kartenmaterial oder mit Satellitensystemen wie z.B. dem GPS (Global Positioning System) ermittelt werden (vgl. Abbildung 1).

Die zweite Frage bedeutet die Festlegung des Ziels, das im Allgemeinen durch seine geographischen Koordinaten und die Höhe gegenüber dem Meeresspiegel beschrieben wird. Hier ist das wichtigste Hilfsmittel die Karte. Die Antwort auf die dritte Frage erfordert mehrere Schritte, nämlich die Festlegung der Wegstrecke, die Wahl der Navigationsinstrumente, die Berechnung des Kurses und des Treibstoffbedarfs bei vorgegebenem Fahrzeug bzw. Flugzeug. Als Instrumente kommen typischerweise Karten, Kompasse, Sextanten, Inertialsysteme, Radar und Digitalrechner zum Einsatz. Da der Weg meistens nicht auf einer Geraden verläuft, Hindernissen ausgewichen werden muss und das Fahrzeug, Schiff oder Flugzeug von seinem idealen Weg abdriftet, muss während der Reise laufend die momentane Position bestimmt und von ihr aus der neue Kurs berechnet werden.
Bisher erforderte die Navigation immer noch das Eingreifen des Menschen. Der Mensch bestimmt das Ziel, bedient die Navigationsinstrumente, berechnet mit Hilfe von Computern den aktuell erforderlichen Kurs und steuert dann mit diesen Informationen das Fahrzeug. Durch die Verfügbarkeit von sehr leistungsfähigen Kleinrechnern und hochgenauen Navigationssystemen gewinnt die Navigation von autonomen Systemen zu Wasser, zu Land, in der Luft und im Weltraum zunehmend an Bedeutung. Zu diesem Zweck müssen neue kostengünstige Navigationsgeräte und schnelle und zuverlässige Navigationsalgorithmen entwickelt werden.
Im Fachbereich werden die Möglichkeiten erforscht, wie MEMS-Beschleunigungs- und Drehratensensoren (Micro-Electro-Mechanical System) zum Beispiel im Kraftfahrzeug und in der autonomen Navigation eingesetzt werden können. Da die Sensoren nicht die für die autonome Navigation hohe Stabilität aufweisen, müssen sie durch zusätzliche Sensoren gestützt werden. Für die Stützung kann z.B. GPS eingesetzt werden, das sehr stabile Messergebnisse liefert, aber eine viel geringere Messrate als die MEMS-Sensoren aufweist. Die MEMS-Sensoren haben den Vorteil, dass sie in abgeschatteten Bereichen, wie beispielsweise in Tunnels, Messergebnisse liefern, wo GPS keinen Empfang hat. Dieses Beispiel macht deutlich, dass eine Vielzahl von Navigationssensoren für die autonome Navigation erforderlich ist. Werden zur Lösung eines Navigationsproblems mehrere Sensoren eingesetzt, sprechen wir nicht mehr von einem Navigationsgerät, sondern von einem Navigationssystem.
Ziel der Forschungsarbeiten im Fachbereich ist die Entwicklung optimierter Navigationssysteme, die eine autonome Navigation ermöglichen. Der Anwender sollte lediglich das Ziel eingeben müssen und das Fahrzeug sich dann den Weg selbst suchen. Um dieses zuverlässig durchzuführen, werden parallel GPS, Radar, Kameras, Inertialsysteme und vieles mehr in einem Systemverbund betrieben. Hierzu ist eine umfangreiche Algorithmen- und Software-Entwicklung erforderlich.
Kontakt
