
Effizientes ingenieurgeodätisches Monitoring von Verkehrsbauwerken
Die Schleusenanlage Hessigheim am Neckar, 143,01 km (siehe Abbildung 1), wurde auf instabilem Grund errichtet. Durch Auslaugungsvorgänge von Gips in der oberen Tonanhydritschicht können sich Hohlräume bilden, die Bodensenkungen nach sich ziehen. Die relativen Bodensenkungen betragen überschlägig 1 mm/a bis 1 cm/a (relativ zum unmittelbaren Bauwerksumfeld). Die entsprechenden relativen Verschiebungen liegen im Bereich von einigen mm/a. Die absoluten Bodensenkungen sind unbekannt (und aus Monitoring-Sicht sekundär).
Die Schleusenanlage wird in Zusammenarbeit mit der Bundesanstalt für Gewässerkunde (BfG) und dem Amt für Neckarausbau Heidelberg (ANH) überwacht. Die Schleusenanlage wird in dreifacher Weise “gemonitort”:
- Ingenieurgeodätisches Monitoring (Tachymeter, Alignement, Extensometer, Fein-Nivellement)
- Luftgestütztes Monitoring (Image Matching, Laserscanning)
- Satelliten-Monitoring (Persistent Scatter Interferometry)
Verschiedene ingenieurgeodätische Konzepte für bautechnische Fragestellungen sollen im Rahmen dieses Projektes analysiert werden. Insbesondere soll das Potential von flächenhaften, permanenten, hochfrequenten Messungen zur Überwachung der Schleusenanlage untersucht werden.
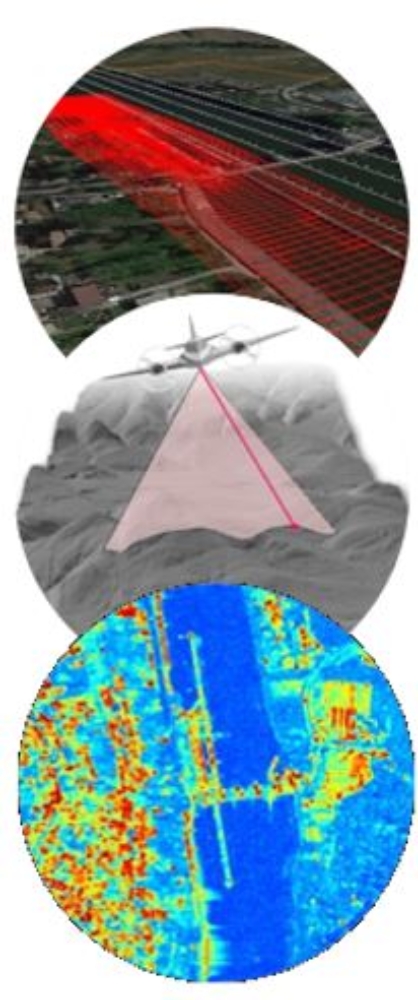
Luftgestütztes Monitoring (durch Image Matching oder Laserscanning) und Satelliten-Monitoring (durch Persistent Scatter Interferometry) sind berührungslose Messmethoden (siehe Abbildung links). Solche Fernerkundungsmethoden sind in der Lage, große Gebiete in kurzer Zeit zu erfassen. Bei Satellitensensoren ist eine zeitliche Überwachung möglich. Abhängig vom Wiederholungszyklus des Satelliten (normalerweise zwischen ein paar Tagen bis zu Wochen) können Zeitreihen von Bildern mit hoher zeitlicher Auflösung erhalten werden. Des Weiteren soll dieses Projekt die Wirksamkeit für ein effizientes flächendeckendes Hochfrequenz-Monitoring hinsichtlich einer hohen Qualitätssicherung nachweisen. Darüber hinaus ist eine spätere Praxistauglichkeit mit dem Ziel der Ergebnisübertragbarkeit auf vergleichbare Fragestellungen von übergeordneter Bedeutung.
Ingenieurgeodätisches Monitoring:
Hochgenaues Monitoring erfolgt üblicherweise durch ingenieurgeodätische Methoden wie zum Beispiel Tachymetrie und Feinnivellement. Die ingenieurgeodätische Überwachung ist jedoch nur punktbasiert und sehr zeitaufwendig. Zudem können schwer zugängliche Bereiche die ingenieurgeodätische Überwachung erschweren oder gar unmöglich machen.
Luftgestütztes Monitoring (Image Matching, Laserscanning):
Luftbilder und Airborne Laserscanning (ALS) bieten den Vorteil, dass flächendeckende, hochauflösende Punktwolken erzeugt werden können – unabhängig von der Zugänglichkeit des zu überwachenden Objektes. Darüber hinaus können die Punkte der Punktwolke mit semantischen Informationen verknüpft werden.
Im Falle der Schleusenüberwachung muss die Standard-Multi-Stereo-Image-Prozessierung (Matching, 3D-Rekonstruktion, DEM-Generierung, Erzeugung eines True Orthophotos) an die anspruchsvolle Wasserumgebung angepasst werden. Gleiches gilt für die Standard-Laserscanning-Prozessierung mittels Streifenausgleich. Für das Monitoring der Schleusenanlage wird eine Ground Sampling Distance (GSD) von 3-5 mm und eine minimale Punktdichte von 4 Punkten pro 10 x 10 cm angestrebt. Für jeden Überwachungszeitraum können beide Punktwolken zusammengeführt werden, um somit eine dichte Punktwolke zu erzeugen. Diese Punktwolken können zur Erzeugung von Differenzmodellen und damit zur Visualisierung von Relativbewegungen der Schleusenanlage und der umgebenden Objekte verwendet werden.
Satellitenüberwachung (Persistent Scatterer Interferometry):
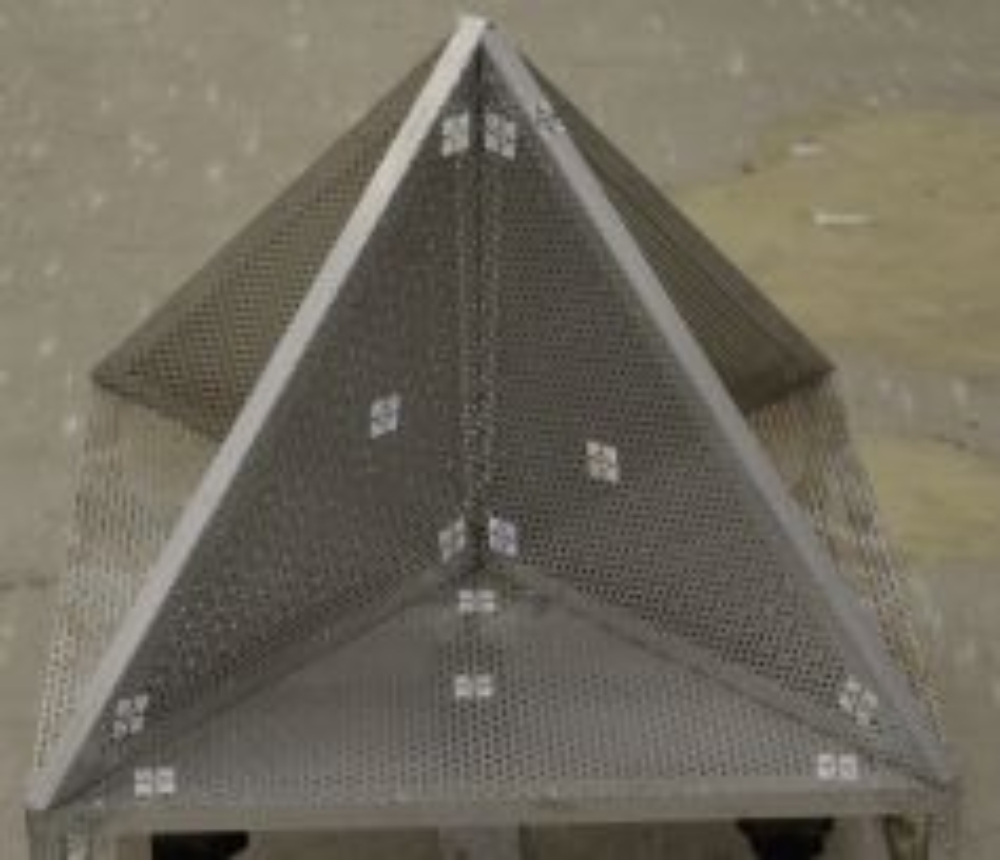
Zusätzlich zu den voran genannten Methoden soll die Bewegung der Schleusenanlage mittels Persistent Scatterer Interferometric Synthetic Aperture Radar (PSInSAR) überwacht werden. Hierfür werden TerraSAR-X- und Sentinel-1-Daten verwendet. Die Grundidee der Persistent Scatterer Interferometry besteht darin, Pixel mit einem konstanten Reflexionsverhalten innerhalb eines Stapels von Radarbildern zu erkennen. Im Allgemeinen entsprechen diese Pixel starren Objekten mit glatten Oberflächen. In städtischen Gebieten stellen Gebäude solche "natürliche" Persistent Scatterers dar. Künstliche Persistent Scatterers werden nahe der Schleusenanlage montiert. Die Funktionsweise der sogenannten Corner-Reflektoren (siehe Abbildung 2) entspricht der Funktionsweise von Retro-Reflektoren.
Erste Ergebnisse:
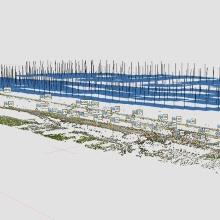
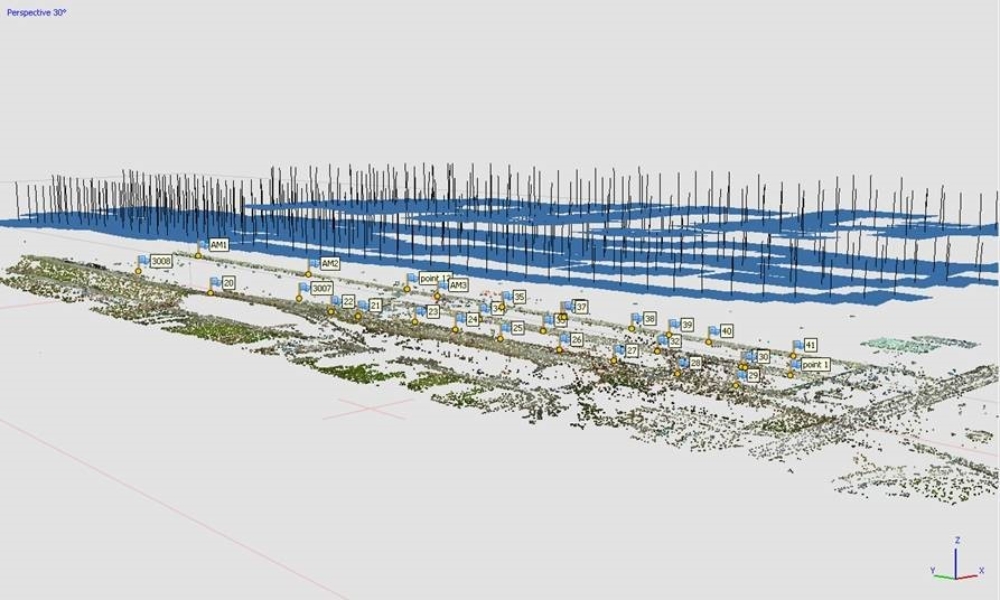
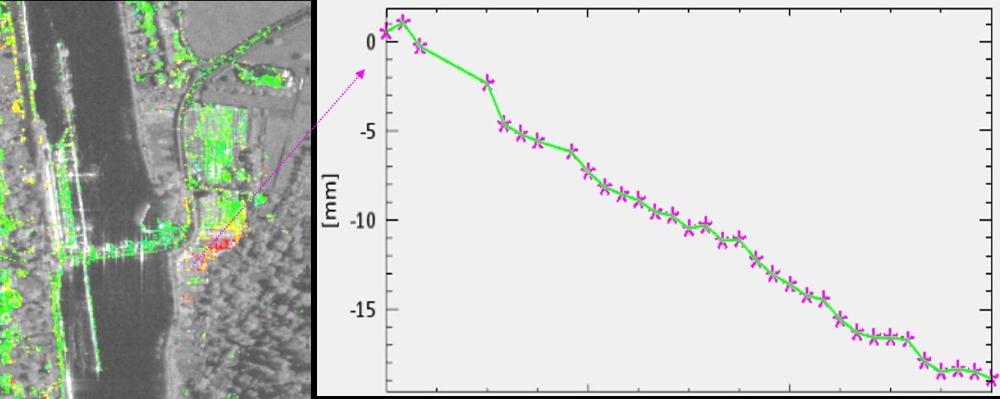
Beim ersten Bildflug im Januar 2018 konnte eine Objektpunktgenauigkeit von 3-8 mm erzielt werden. Abbildung 3 zeigt das Ergebnis des Matching (Sparse Point Cloud) sowie die orientierten Kameras (blau). Abbildung 4 zeigt eine erste Auswertung von PSInSAR.
Kontakt

Uwe Sörgel
Prof. Dr.-Ing.Fachstudienberater