
Indoor Change Detection (BIM-As-Build versus As-Design)
Eine Vielzahl von Systemen zur Abbildung und Interpretation von Outdoor-Umgebungen kann automatisch aktualisierte 3D-Modelle verarbeiten. Es gibt jedoch noch Forschungsarbeiten über die Verarbeitung ähnlicher Modelle für den Innenraum. Ein herausforderndes Problem im Bereich Building Information Modeling (BIM) besteht darin, aktuelle Modelle zu pflegen. Obwohl nicht für jedes Gebäude ein BIM-Modell zur Verfügung steht, stehen für einige von ihnen ältere Laserscanner-Punktwolken zur Verfügung, die als Referenz für den Vergleich mit einem aktuellen Modell dienen können.
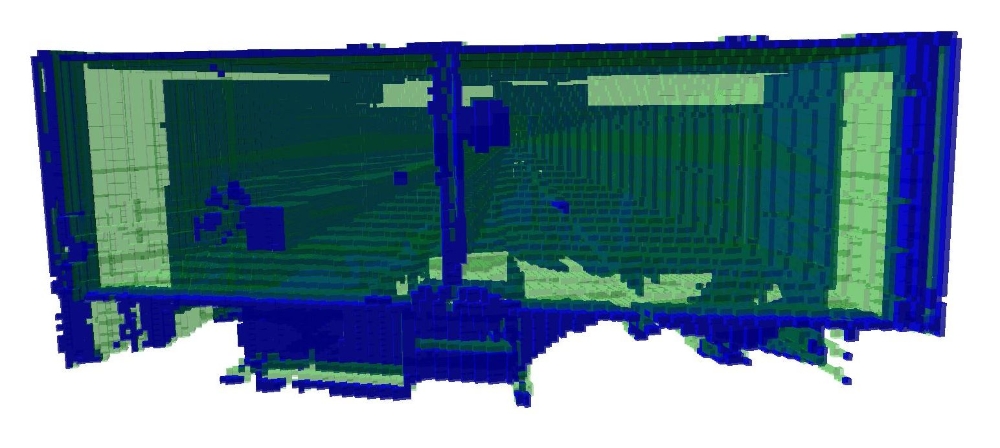
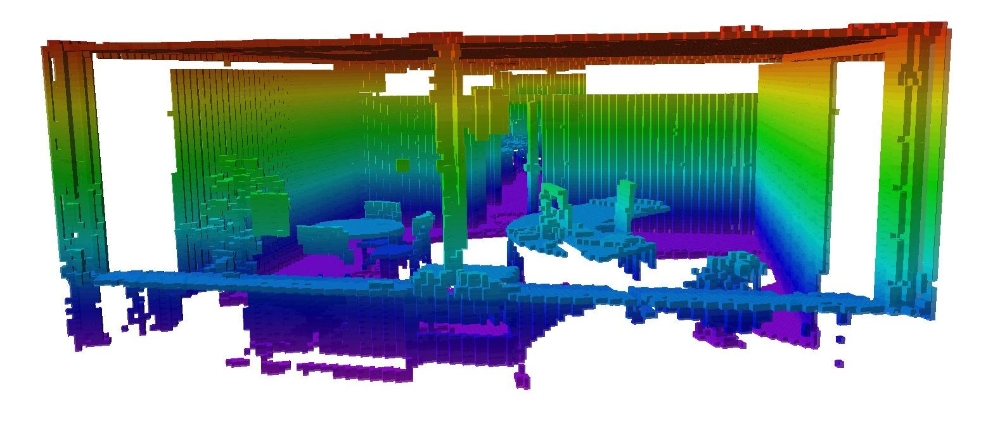
Als ersten Schritt zur automatischen Erkennung von Innenraumveränderungen verwendeten wir eine TLS-Punktwolke (indoor terrestrial laser scanner), die aus 31 einzelnen Scans bestand. Die verfügbaren Scans wurden in einer Octree-Struktur gespeichert. In Anbetracht der Scannerpositionen war es möglich, einen Ray-Tracing-Algorithmus zu verwenden, um zwischen drei verschiedenen Zuständen zu unterscheiden. Jede Octree-Zelle gilt als besetzt, wenn sich darin Punkte befinden. Die Zelle wird als frei zugewiesen, wenn mindestens ein Strahl durch sie hindurchgeht, oder der Zustand wird als unbekannt betrachtet. Unter Verwendung dieser Struktur kann weiter untersucht werden, ob das Modell einem vorher verfügbaren Modell entspricht. Auch kann die Situation untersucht werden, wenn weitere Veränderungen auftreten und wir uns ihrer und ihrer ungefähren Lage bewusst sind. In diesem Fall, Ein kostengünstiges Gerät mit einem Reichweitensensor (wie Google Tango) könnte verwendet werden, um die Änderungen zu überwachen. Die Octree-Struktur erlaubt eine Aktualisierung des entsprechenden Teils des Modells, indem einfach der Zustand der entsprechenden Voxel geändert wird.
Kontakt

Uwe Sörgel
Prof. Dr.-Ing.Fachstudienberater